5754
中国人工智能学会公布2017年度第七届吴文俊人工智能科学技术奖评审结果。由电子科技大学、清华大学和布法罗机器人科技(成都)有限公司共同参与,以我校机器人研究中心程洪教授、林西川副教授、邱静副教授、黄瑞博士以及清华大学孙富春教授、刘华平副教授为主要完成人的研究成果“物理紧耦合人机系统关键技术及其应用”,荣获吴文俊人工智能科技进步奖一等奖。这是我校首次获得被誉为“中国智能科学技术最高奖”的该项荣誉。

近日,中国人工智能学会公布2017年度第七届吴文俊人工智能科学技术奖评审结果。由电子科技大学、清华大学和布法罗机器人科技(成都)有限公司共同参与,以我校机器人研究中心程洪教授、林西川副教授、邱静副教授、黄瑞博士以及清华大学孙富春教授、刘华平副教授为主要完成人的研究成果“物理紧耦合人机系统关键技术及其应用”,荣获吴文俊人工智能科技进步奖一等奖。这是我校首次获得被誉为“中国智能科学技术最高奖”的该项荣誉。
经全国各地方人工智能学会、各高校及科研院所、团体会员单位和资深院士推荐,此次评审共收到296个申报项目,最终对44个成果授奖。其中包括吴文俊人工智能自然科学奖12项、吴文俊人工智能技术发明奖8项、吴文俊人工智能科技进步奖10项,以及吴文俊人工智能科技进步奖企业技术创新工程项目8项、吴文俊人工智能科技进步奖科普项目1项、吴文俊人工智能优秀青年奖5项。其中吴文俊人工智能三大奖仅有5个项目获得一等奖,占总数的1.69%。颁奖盛典将于12月22-24日在苏州举行。
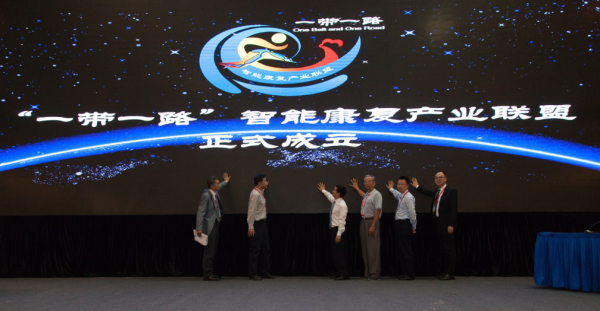
2017年9月,学校发起并成立“一带一路”智能康复产业联盟
此次获奖,凝聚了机器人研究中心团队在人工智能和机器人领域深耕多年的成果。在本次获奖的研究项目中,针对人机系统科学难题,团队提出并建立了一套完整的人机混合系统理论框架,围绕人机混合智能系统的三大科学问题进行了深入研究,最终形成三大核心技术:一是人机系统交互参数建模及适配。提出了外骨骼步态运动的自动人机适配技术,充分考虑了人体结构、多模态的异常步态特征信息,建立了基于人因工效学的外骨骼仿生自适应结构和改良的弹簧阻尼模型,实现了对多种人体和不同步态的自适应匹配;二是快速人体运动意图感知及预测。建立了外骨骼与人体之间的交互信息和动力学因子的多种非线性映射模型,提出针对该模型的非参数学习技术,实现了对人体运动意图的在线感知和预测。三是基于增强学习的智能步态规划。提出了物理人机交互中的动力学模型在线学习技术,利用增强学习算法首次实现了对外骨骼穿戴者进行实时的在线动力学参数测量和建模。围绕着三大科学问题形成了人机混合智能系统理论和技术体系。

2015年全国第九届残运会暨第六届特奥会开幕式上,外骨骼机器人助力残疾小伙林寒传递圣火

程洪教授在我校承办的第二届全国医学智能大会暨“一带一路”智能康复国际研讨会上发言
近年来,学校大力实施“电子信息+”战略和“一校一带”行动计划。机器人研究中心团队不仅在人工智能关键技术方面取得了丰硕成果,在“电子信息+康复”核心技术的应用上也收获颇丰。由程洪教授领衔的跨学科团队研发的具有国际领先水平的康复外骨骼系统(AssItive DEvice for paRalyzed patient,AIDER)已在康复医疗临床上开展应用,成为我国人工智能技术在机器人领域应用的一个典型示范。在2015年全国第九届残运会暨第六届特奥会开幕式上,该研究成果让截瘫患者摆脱轮椅,站立行走并点燃了主火炬。2016年,程洪教授团队代表学校参加全国首届医用机器人和医学智能化大会,在开幕式上正式发布AIDER1.0个人助行外骨骼机器人。两年来,中央电视台、人民日报、新华社、BBC等海内外媒体,均对中心的外骨骼康复机器人研发成果进行了专题报道。
程洪教授表示,此次获奖是对我校在人工智能领域技术实力和重要贡献的高度认可。机器人研究中心将进一步加强人工智能技术的科学研究和产业应用,实现“人工智能+”与“电子信息+”的深度融合。
原文链接:http://www.news.uestc.edu.cn/?n=UestcNews.Front.Document.ArticlePage&Id=61924